
Лекции
1
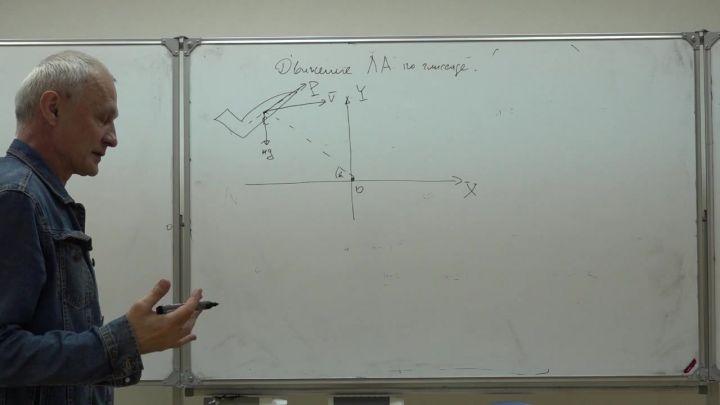
Семинар 1. Основные понятия механики управляемых систем. Физическая и математическая модели системы. Программное управление и управление при помощи обратной связи. Устойчивость
01:05:44
2
Семинар 2. Управляемость. Критерий управляемости. Контрвариантные координаты
00:55:16
3
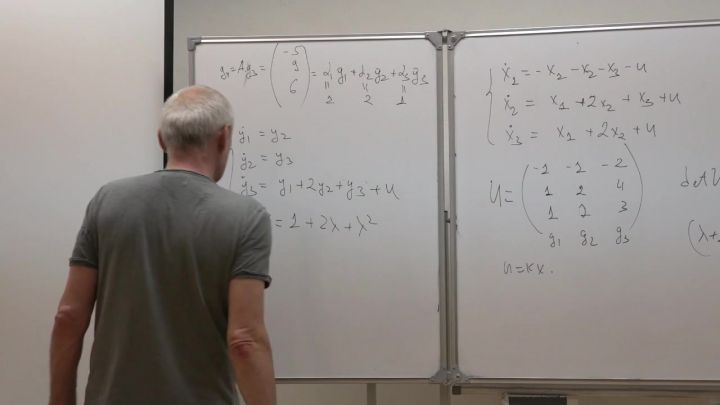
Семинар 3. Декомпозиция по вектору управления
00:56:13
4
Семинар 4. Задача наблюдения и оценивания. Критерий наблюдаемости. Ковариантные координаты
00:51:13
5
Семинар 5. Стабилизация системы при полной информации об отклонениях
00:42:35
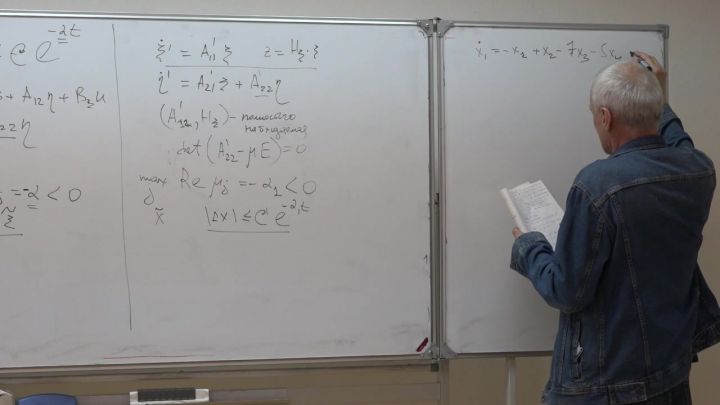
6
Семинар 6. Асимптотически устойчивый алгоритм оценивания
01:19:08
7
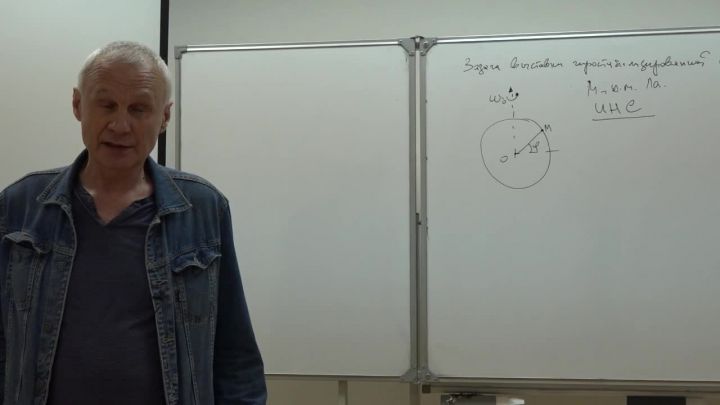
Семинар 7. Построение алгоритма оценивания в задаче выставки ИНС
00:42:51
8
Семинар 8. Совместная задача управления и оценивания
00:45:54
9
Семинар 9. Стохастические модели управляемых систем
01:30:22
10
Семинар 10. Дискретный фильтр Калмана
00:35:09